
WaitGroup 同步
sync包的WaitGroup类型。它比通道更加适合实现这种一对多的 goroutine 协作流程。
sync.WaitGroup类型(以下简称WaitGroup类型)是开箱即用的,也是并发安全的。它一旦被真正使用就不能被复制了。WaitGroup类型拥有三个指针方法:Add、Done和Wait。你可以想象该类型中有一个计数器,它的默认值是0。我们可以通过调用该类型值的Add方法来增加,或者减少这个计数器的值。
一般情况下,我会用这个方法来记录需要等待的 goroutine 的数量。相对应的,这个类型的Done方法,用于对其所属值中计数器的值进行减一操作。我们可以在需要等待的 goroutine 中,通过defer语句调用它。
而此类型的Wait方法的功能是,阻塞当前的 goroutine,直到其所属值中的计数器归零。如果在该方法被调用的时候,那个计数器的值就是0,那么它将不会做任何事情。
WaitGroup类型的值(以下简称WaitGroup值)完全可以被用来替换coordinateWithChan函数中的通道sign。
func coordinateWithWaitGroup() {
var wg sync.WaitGroup
wg.Add(2)
num := int32(0)
fmt.Printf("The number: %d [with sync.WaitGroup]\n", num)
max := int32(10)
go addNum(&num, 3, max, wg.Done)
go addNum(&num, 4, max, wg.Done)
wg.Wait()
}由于wg变量的Done方法本身就是一个既无参数声明,也无结果声明的函数,所以我在go语句中调用addNum函数的时候,可以直接把该方法作为最后一个参数值传进去。
在coordinateWithWaitGroup函数的最后,我调用了wg的Wait方法。如此一来,该函数就可以等到那两个 goroutine 都运行结束之后,再结束执行了。
sync.WaitGroup类型值中计数器的值不可以小于0。因为这样会引发一个 panic。 不适当地调用这类值的Done方法和Add方法都会如此。别忘了,我们在调用Add方法的时候是可以传入一个负数的。
声明了这样一个变量之后,应该首先根据需要等待的 goroutine,或者其他事件的数量,调用它的Add方法,以使计数器的值大于0。这是确保我们能在后面正常地使用这类值的前提。
如果我们对它的Add方法的首次调用,与对它的Wait方法的调用是同时发起的,比如,在同时启用的两个 goroutine 中,分别调用这两个方法,那么就有可能会让这里的Add方法抛出一个 panic。虽然WaitGroup值本身并不需要初始化,但是尽早地增加其计数器的值,还是非常有必要的。
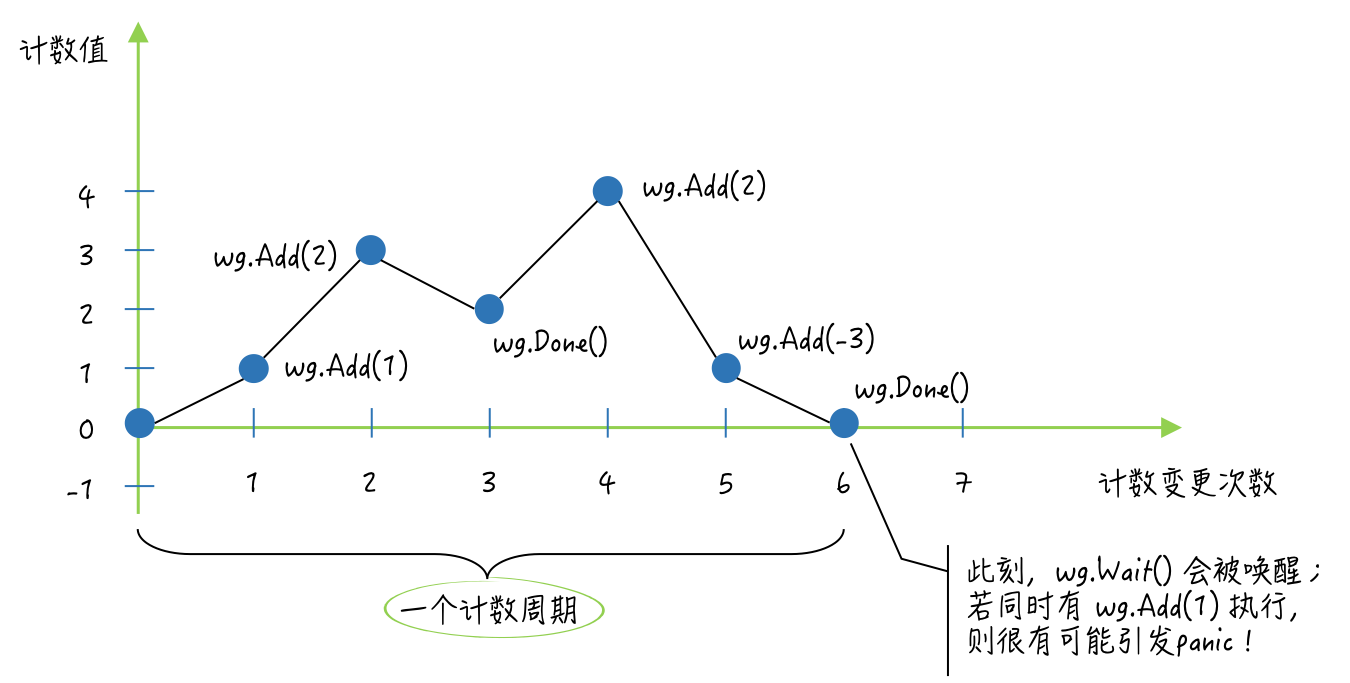
WaitGroup值是可以被复用的,但需要保证其计数周期的完整性。这里的计数周期指的是这样一个过程:该值中的计数器值由0变为了某个正整数,而后又经过一系列的变化,最终由某个正整数又变回了0。
只要计数器的值始于0又归为0,就可以被视为一个计数周期。在一个此类值的生命周期中,它可以经历任意多个计数周期。但是,只有在它走完当前的计数周期之后,才能够开始下一个计数周期。
也可以说,如果一个此类值的Wait方法在它的某个计数周期中被调用,那么就会立即阻塞当前的 goroutine,直至这个计数周期完成。在这种情况下,该值的下一个计数周期,必须要等到这个Wait方法执行结束之后,才能够开始。
如果在一个此类值的Wait方法被执行期间,跨越了两个计数周期,那么就会引发一个 panic。
例如,在当前的 goroutine 因调用此类值的Wait方法,而被阻塞的时候,另一个 goroutine 调用了该值的Done方法,并使其计数器的值变为了0。
这会唤醒当前的 goroutine,并使它试图继续执行Wait方法中其余的代码。但在这时,又有一个 goroutine 调用了它的Add方法,并让其计数器的值又从0变为了某个正整数。此时,这里的Wait方法就会立即抛出一个 panic。
纵观上述会引发 panic 的后两种情况,我们可以总结出这样一条关于WaitGroup值的使用禁忌,即:不要把增加其计数器值的操作和调用其Wait方法的代码,放在不同的 goroutine 中执行。换句话说,要杜绝对同一个WaitGroup值的两种操作的并发执行。
我们通常需要反复地实验,才能够让WaitGroup值的方法抛出 panic。再次强调,虽然这不是每次都发生,但是在长期运行的程序中,这种情况发生的概率还是不小的,我们必须要重视它们。
sync.Once
与sync.WaitGroup类型一样,sync.Once类型(以下简称Once类型)也属于结构体类型,同样也是开箱即用和并发安全的。由于这个类型中包含了一个sync.Mutex类型的字段,所以,复制该类型的值也会导致功能的失效。
Once类型的Do方法只接受一个参数,这个参数的类型必须是func(),即:无参数声明和结果声明的函数。
该方法的功能并不是对每一种参数函数都只执行一次,而是只执行“首次被调用时传入的”那个函数,并且之后不会再执行任何参数函数。
所以,如果你有多个只需要执行一次的函数,那么就应该为它们中的每一个都分配一个sync.Once类型的值(以下简称Once值)。
Once类型中还有一个名叫done的uint32类型的字段。它的作用是记录其所属值的Do方法被调用的次数。不过,该字段的值只可能是0或者1。一旦Do方法的首次调用完成,它的值就会从0变为1。因为对它的操作必须是“原子”的。Do方法在一开始就会通过调用atomic.LoadUint32函数来获取该字段的值,并且一旦发现该值为1,就会直接返回。这也初步保证了“Do方法,只会执行首次被调用时传入的函数”。
单凭这样一个判断的保证是不够的。因为,如果有两个 goroutine 都调用了同一个新的Once值的Do方法,并且几乎同时执行到了其中的这个条件判断代码,那么它们就都会因判断结果为false,而继续执行Do方法中剩余的代码。
在这个条件判断之后,Do方法会立即锁定其所属值中的那个sync.Mutex类型的字段m。然后,它会在临界区中再次检查done字段的值,并且仅在条件满足时,才会去调用参数函数,以及用原子操作把done的值变为1。
如果你熟悉 GoF 设计模式中的单例模式的话,那么肯定能看出来,这个Do方法的实现方式,与那个单例模式有很多相似之处。它们都会先在临界区之外,判断一次关键条件,若条件不满足则立即返回。这通常被称为 “快路径”,或者叫做“快速失败路径”。
如果条件满足,那么到了临界区中还要再对关键条件进行一次判断,这主要是为了更加严谨。这两次条件判断常被统称为(跨临界区的)“双重检查”。
由于进入临界区之前,肯定要锁定保护它的互斥锁m,显然会降低代码的执行速度,所以其中的第二次条件判断,以及后续的操作就被称为“慢路径”或者“常规路径”。
Do方法中的代码不多,但它却应用了一个很经典的编程范式。我们在 Go 语言及其标准库中,还能看到不少这个经典范式及它衍生版本的应用案例。
Do方法在功能方面的两个特点
第一个特点,由于Do方法只会在参数函数执行结束之后把done字段的值变为1,因此,如果参数函数的执行需要很长时间或者根本就不会结束(比如执行一些守护任务),那么就有可能会导致相关 goroutine 的同时阻塞。
有多个 goroutine 并发地调用了同一个Once值的Do方法,并且传入的函数都会一直执行而不结束。那么,这些 goroutine 就都会因调用了这个Do方法而阻塞。因为,除了那个抢先执行了参数函数的 goroutine 之外,其他的 goroutine 都会被阻塞在锁定该Once值的互斥锁m的那行代码上。
第二个特点,Do方法在参数函数执行结束后,对done字段的赋值用的是原子操作,并且,这一操作是被挂在defer语句中的。因此,不论参数函数的执行会以怎样的方式结束,done字段的值都会变为1。
也就是说,即使这个参数函数没有执行成功(比如引发了一个 panic),我们也无法使用同一个Once值重新执行它了。所以,如果你需要为参数函数的执行设定重试机制,那么就要考虑Once值的适时替换问题。
最后更新于